
轻舟智航的转型,用 1 万元的成本量产 NOA

智能驾驶在今年走进了分岔路。
一方面,立足于 L2 的 OEM 和供应商在今年实现了由高速走向城区的场景拓展,代表企业有小鹏和华为。一方面,高举高打 L4 的 Robotaxi 企业遇了冷,大批企业遭外界唱衰、路测停滞甚至倒闭......
这波「寒气」虽然还未让国内 L4 公司窘迫不堪,但是转型、寻求规模化量产落地已经成了燃眉之急。
而这一波转型浪潮中,轻舟智航算是动作最快的公司之一。

轻舟智航今年开了两场大型发布会,今年五月,轻舟发布「双擎」战略,即在持续投入研发布局 L4 级 Robobus 的同时,向车企供应稳定成熟的且可自由配置的智能驾驶前装量产方案。
说白了,双擎指的就是两条腿走路,一边坚持 L4 的投入,一边寻求 L2 级的前装落地。
而在 11 月初,轻舟发布了自动驾驶解决方案 Driven-by-QCraft 的中文名称——轻舟乘风。

一般 L4 以供应商身份入局,公众最关心的问题主要有三点:
第一,硬件成本如何控制?毕竟大多数 L4 公司几乎是不计成本的为测试车堆叠硬件,光是覆盖 360° 视野激光雷达的成本,量产车都是 hold 不住的。
关于激光雷达需要多提一句,大多数 L4 公司所采用的激光雷达是机械激光雷达,不太需要在意车辆的造型。但是量产车则完全相反,想要上车,就必须用一个或多个固态/半固态雷达。
第二,算法层面的技术能力如何?毕竟上了量产车就得满地跑了,虽然测试示范区域也属于公开道路环境,但区域一大扩大,道路环境会更复杂,corner case 势必会更多。

第三,前装量产的前景如何?有个残忍的现实是,虽然现阶段每家车企都越来越注重智能驾驶的能力,但头部车企大多都坚持自研,而大型 OEM,例如比亚迪、广汽、长城等等,都已经敲定了合作伙伴,甚至量产了相关功能。也就是说,以目前的发展来看,智驾的「摊子」在变大,但是留给 L4 的优质客户并不是那么多。
而站在 2022 年底这个时间,行业里除了 Momenta 与智己联合交付了量产基础辅助驾驶功能以外,还鲜有 L4 公司能够在于 OEM 的合作中交付亮眼产品,甚至还有一些 L4 公司仍在坚守 L4 自动驾驶这条路线。
而轻舟智航算是第一批主动转型的自动驾驶公司,我们刚好借这个机会看看轻舟的解题思路。
想量产?降本很重要
L4 转型做 L2 功能量产,首先需要迈过的坎就是削减成本,毕竟一辆主销中端车型,其售价也就在二十多万元,留给智驾软硬件的成本空间并不多。

在今年 5 月的发布会上,轻舟公布了覆盖了 L2—L4 场景的 DBQ V4 方案,该方案共有三个版本,分别是旗舰版、加强版与标配版。
其中,旗舰版配备了 12 颗摄像头、 5 颗半固态激光雷达(1 颗主激光雷达、4 颗补盲激光雷达)以及 6 颗毫米波雷达,这套方案的目标是实现 L4 级别的自动驾驶。
而成本方面,据某头部激光雷达供应商称,其新推出的半固态补盲雷达价格在几千元级别,这样来看,其总成本(所有硬件)很可能在小几万元左右,这样的价格对于中端车型来说并不是很友好。
相比之下,硬件配置有所削减的 DBQ V4 标配版更具性价比。

标配版系统搭载了一颗激光雷达,其布局位置也是在车辆额头位置。轻舟智航称,标配版系统总硬件成本在一万元以内。而硬件则包含了激光雷达、毫米波雷达、摄像头只能驾驶域控制器。

同时,轻舟智航称要以 1 万元的硬件成本,实现 99% 的 L4 能力。
换句话说,轻舟首先要将这些硬件成本压缩到 1 万元以内,其次还要依赖这套硬件实现城市级 NOA。这不由让我想到了特斯拉 FSD,凭借并不昂贵的摄像头,实现城市区域的 FSD Beta。
而特斯拉$特斯拉(TSLA)$ 以低成本落地 FSD Beta 的核心秘诀有两个,一是全栈自研,这里自研不仅包括软件,还包括 FSD 芯片等核心硬件。第二,软件算法能力。
所以,压低成本的轻舟,其软件算法能力如何?
在今年的轻舟科技工坊上,轻舟软件团队对外展示了一波核心技术。
超融合感知与时空联合规划
什么是「超融合」
轻舟智航称:「万丈高楼感知起」,相信没有人质疑「感知能力」之于自动驾驶的重要度。

而不同的传感器,其感知方式和采集数据都是不同的,如何处理并利用好这些数据便成了关键,这其中最重要的就是算法模型。
我们都知道,采用多传感器的系统方案,往往需要将不同的数据进行融合,行业主流的方式包括前融合与后融合,部分车企还会进行中融合。
前融合指的是数据融合,即把各传感器的原始数据进行融合处理,得到的是一个具有多维综合信息的结果层目标。
例如将摄像头信息与激光雷达数据进行融合,得到的结果就既包含颜色、物体类别,又包含形状、距离信息。如果再加上毫米波雷达,还能够根据本车的速度得到相对距离与相对速度等信息。
后融合也叫目标级融合,或者也说结果融合。指的是每个传感器首先生成感知结果,例如图像、点云等等。
此时系统将这些数据带入到现实坐标系中进行转换,目标数据处理完成后,再进行融合。后融合是传统智能驾驶常用的融合方法,缺点是低置信度信息会被过滤掉,造成原始数据的丢失。
中融合也叫特征级融合,即首先提取原始数据中的重要特征,进行预处理。目的是将多层次的特征(例如颜色、形状等等)进行提取和处理,实现更高效、智能的图像信息处理。
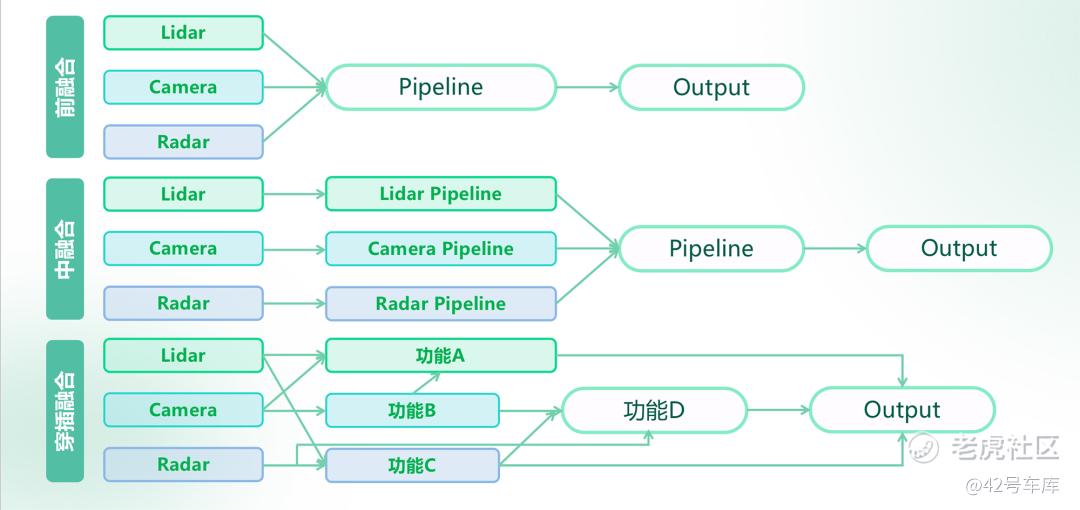
而轻舟智航采用的是时序穿插融合,官方称之为「超融合」。轻舟智航的「超融合」包含了前、中、后融合,而且在时间顺序上是穿插进行的,通过不同传感器的数据融合、或是结果融合,去更好地互补不同传感器的优势。
轻舟智航感知负责人张雨称:超融合感知技术,可让感知模型在不同阶段、利用不同传感器信息相互补充,得到更优融合结果,避免各类误检和漏检,精度高且鲁棒性强。
另外,基于超融合方案,轻舟智航还打造了一套大模型 OminiNet。
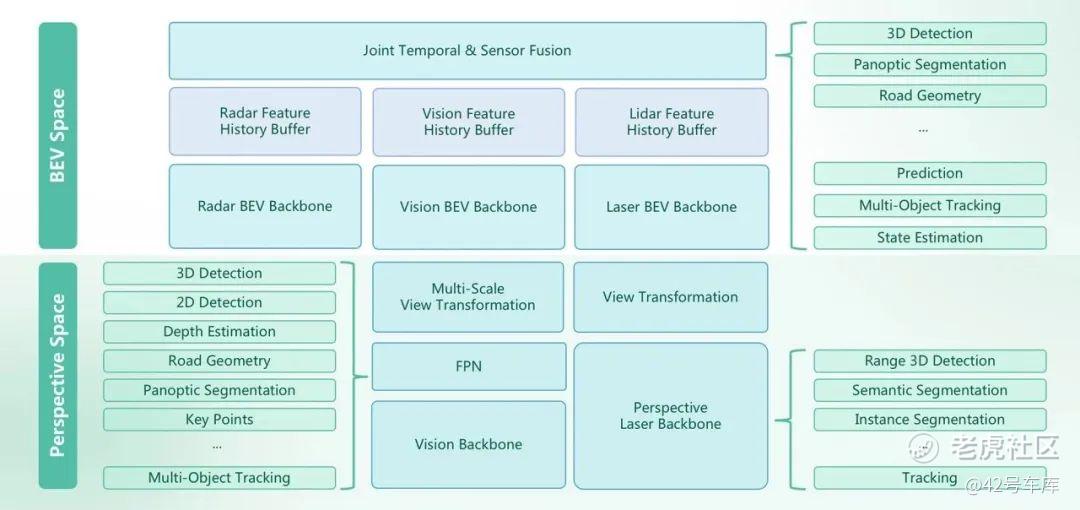
值得注意的是,OminiNet 是一个可将视觉图像、激光雷达点云等信息通过前融合和 BEV 空间特征融合,同时在图像空间和 BEV 空间中输出不同感知任务结果的大模型。
轻舟智航感知负责人张雨也解释了 OminiNet 和小鹏 XNet 的最大区别,虽然二者都是是二者都是一模型、多任务的模型。但是在他看来,还是有以下几点区别:
第一个是感知,轻舟的 OmniNet 相较于 XNet 会增加多传感器融合。比如说 XNet 的输入其实只有图像,根据官方 PPT上来看是多相机、多帧的一个输入模型,而轻舟除了多相机、多帧的相机输入之外,还会有激光雷达和毫米毫米波雷达。
第二点是相较于 XNet 的输出,轻舟的输出会更多样,它会更担负起来感知的多任务输出的角色。举几个例子,第一是小鹏会输出感知的动态目标和静态目标,动态目标包括了位置、姿态、尺寸、速度、预测、静态目标,就包括了车道线、停止线等等。
对于轻舟,除了这些之外,OminiNet 还会输出类似于像特斯拉的 Occupancy Network 一样的通用障碍物占据栅格,以及一些其他的下游的输出。
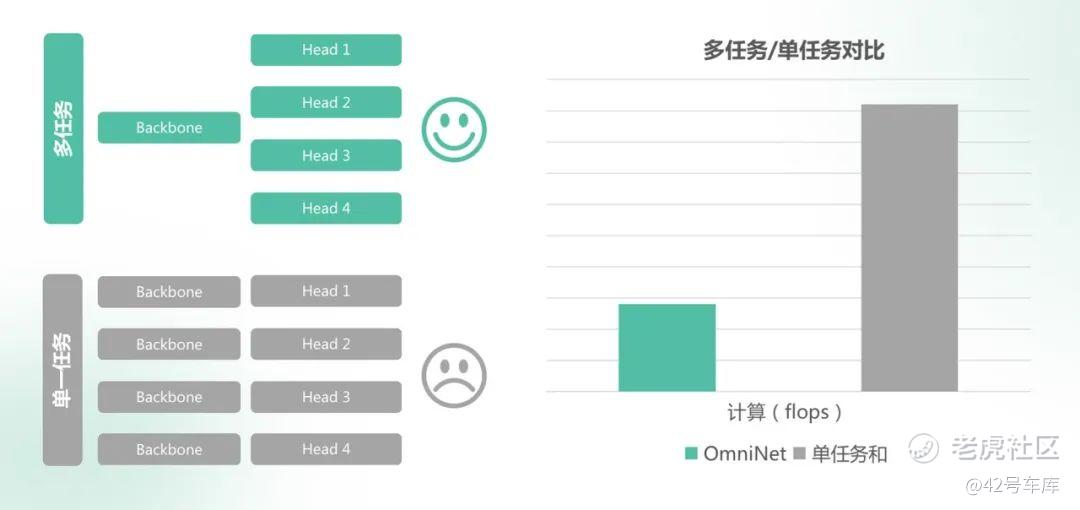
同时,轻舟也宣称 OminiNet 可在提升感知精度的同时,节省 2/3 的算力资源,所以可以部署在量产计算平台上。
时空联合规划算法
感知是基础,而 PNC(规划和控制)则影响着体验。
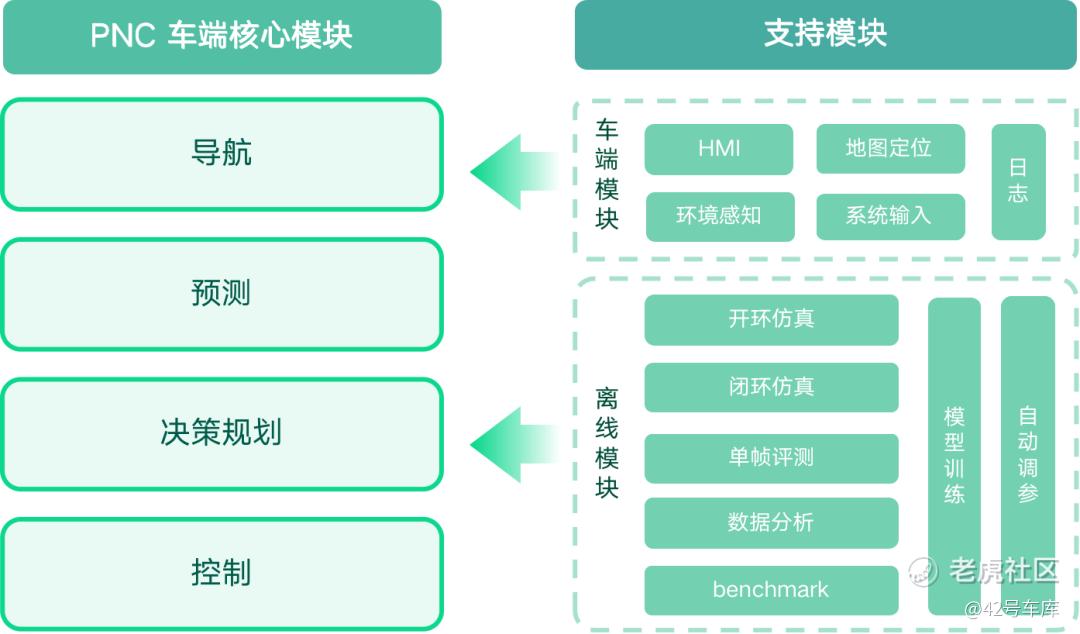
轻舟认为,PNC 是城市 NOA 的超级大脑,轻舟的规划和控制包括了车端核心模块和支持模块。
其中核心模块包含了导航、预测、决策规划和控制。车端模块则包含了 HMI、定位服务、日志、环境感知和系统输入。
在 PNC 方面,轻舟并没有采用业内常用的时空分离算法,转而采用时空联合规划算法。
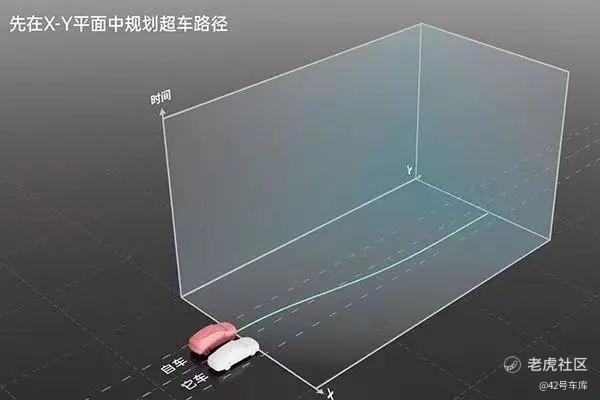
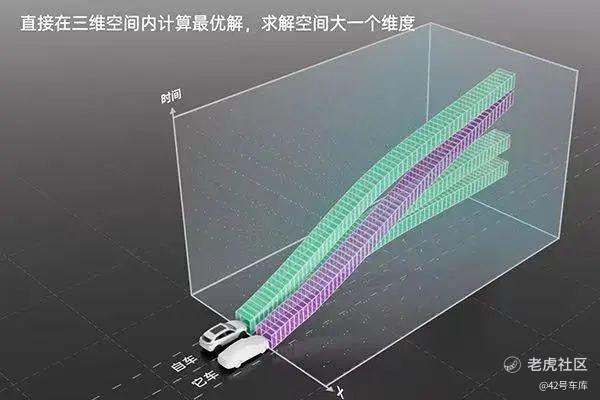
简单地说,传统的「时空分离规划」只考虑了路径规划和速度规划,分别对应横向控制和纵向控制。而「时空联合规划算法」则同时考虑空间和时间来规划轨迹,在路径基础上再求解速度从而形成轨迹,能够能直接在x-y-t(即平面和时间)三个维度的空间中直接求解最优轨迹。
抢滩登陆
在前文中我们提到,一套智驾系统的成功与否,还与市场影响力高度相关。
举个例子,近两年,Mobileye 在国内的风头完全被英伟达、甚至国内供应商地平线压制。主要原因是其「黑盒」方案满足不了国内新势力的需求,且 Mobileye 一向都不是以芯片算力见长。
但没有人会否定这家公司的行业影响力,这不仅仅是因为它的芯片出货量已达到 1 亿片,更是因为当有车企对 L2 基础辅助驾驶功能有需求时,Mobileye 还是有能力提供一套成熟稳定的解决方案。
而对于轻舟智航这类公司来说,与客户联合落地功能,且打出口碑,是非常重要的事情。

在轻舟看来,现在正是入场的好时机。
《2022 中国自动驾驶初创企业投融资系列报告》指出,随着技术的成熟和成本的下降,ADAS 功能逐渐由高端车型向中低端车型渗透。
而随着辅助驾驶的功能逐步量产,更多功能与系统将会成为标配,最终渗透到中低端车型。
根据艾瑞咨询《汽车产业变革浪潮——中国智能驾驶行业研究报告》预测,到 2025 年乘用车辅助驾驶渗透率将达到 65%,L2 级和更高级辅助驾驶进入普及期。

而通过降低成本,将 NOA 等功能渗透到细分市场,正是轻舟去抢占市场的重要途径。
而发布了双擎战略与「乘风」的轻舟智航,其身份也不再仅仅是一家布局 Robobus 的 L4 自动驾驶公司,更是一家智能驾驶通用解决方案供应商。
修改于 2022-11-26 00:29
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
- 奈何桥de旋律·2022-11-26666点赞举报
- 福泰阳光·2022-11-26好1举报