
黑科技!仿生手臂驱动技术研究分析
本文转自微信公众号“器械之家”,作者:器械之家。
来源:类生命系统、机器人大讲堂
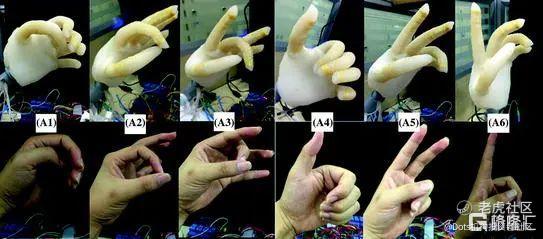
在科幻电影中,失去双手的人可以“长出”机械手而重获新生。在现实生活中,越来越多“赛博朋克”化的仿生手臂逐渐出现在大众面前,炫酷的外观、流畅的动作,不仅能帮助伤残人士重获劳动和生活的能力,还能增强人的身体机能。

你是否好奇,这些仿生手臂是如何实现抓握、操纵等任务的?这其实涉及到一项重要技术——驱动。
最近,北京理工大学和日本电气通讯大学的研究人员在类生命系统(Cyborg and Bionic Systems)期刊上发表了一篇综述,回顾了多种商用和实验室中类人仿生手臂的驱动方法,并讨论每个驱动方法的优缺点,以及如何选择合适的驱动方法来发挥其优势,以便未来研究人员开发更先进的仿生手臂。
01为什么驱动方法的选择如此重要?
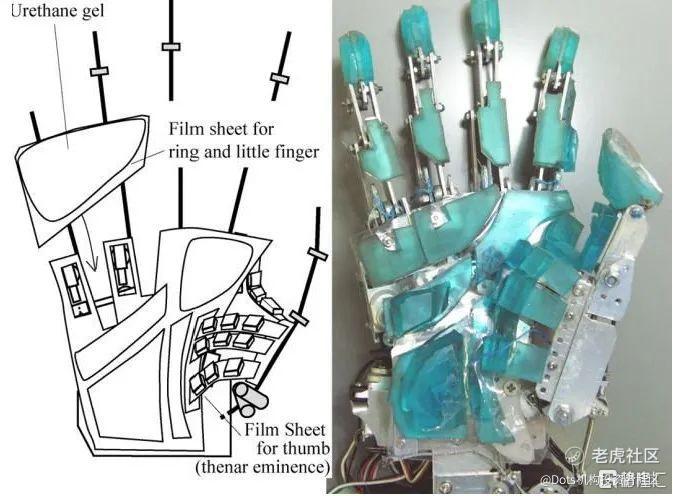
人的双手是最精妙的器官之一,有大量的骨骼和关节,许多关节独立移动,从而让双手可以灵活使用和创造各种工具。因此,要设计仿生手,需要考虑许多设计要求,以模仿人手的功能,包括手指的数量、大小、重量、自由度(DOF)、抓握力和指尖力等。

仿生手的这些性能取决于三个主要要素:驱动、传感器和控制系统,其中驱动方式奠定了一切的基础,不同的驱动方式会对仿生手的一系列性能产生影响,例如齿轮、连杆、流体等,这些不同的驱动方式在重量、尺寸、驱动距离、刚度、驱动精度、驱动精度和驱动效率等方面都有不同,其中可达到的驱动比也有很大差异。
因此,根据设计要求选择和组合合适的驱动方式非常重要,必要时还要考虑将多种驱动方法组合起来使用,从而弥补单一驱动的局限性,但由多种驱动方式组成的混合驱动系统比由单一驱动方式组成的单一驱动系统更难实现。
02驱动方法有哪些?该如何选择?
驱动包括执行器和驱动系统,其中执行器提供运动和功率输出,而驱动系统将运动和功率传输到所需的位置。
执行器一般分为电子、气动和液压执行器,其中电子执行器分为直流、交流和步进电机。仿生手臂主要使用电子执行器,主要的驱动方法可分为肌腱、齿轮、链条、流体(液压和气动)等,在研究人员发表的综述中,这些驱动各有利弊,具有不同的重量、尺寸、变速箱传动距离、刚度、变速箱传动比和变速箱传动效率,也适合不同应用场景的仿生手臂。
肌腱驱动
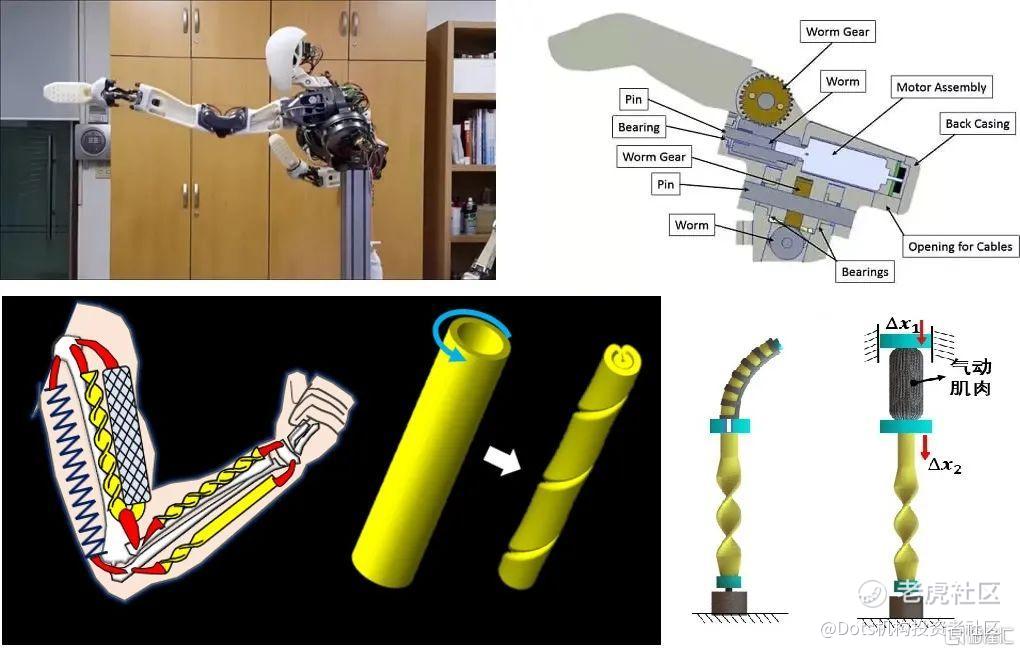
肌腱驱动的仿生手臂具有体积小、重量轻、可远距离传动等特点。由于质量中心(COM)与肩部底座距离较远,因此在运动过程中会产生较大的惯性力,为了最大限度地减少惯性力,上臂中的执行器需要尽可能靠近肩部底座安装,根据执行器安装位置不同,其驱动模式分为内在驱动模式(IAP)、外在驱动模式(EAP)和混合驱动模式(HAP)。

齿轮驱动
齿轮驱动器常用于手指的关节,具有精度高,减速比高,抓握力大等优点,可执行更准确的抓握任务,齿轮可以通过合理配置齿轮比,改变执行器输出的初始速度、扭矩和方向;但人手的关节数目多,为了模仿人手的骨骼关节,通常需要大量的齿轮部件,这会增加仿生手臂的重量。
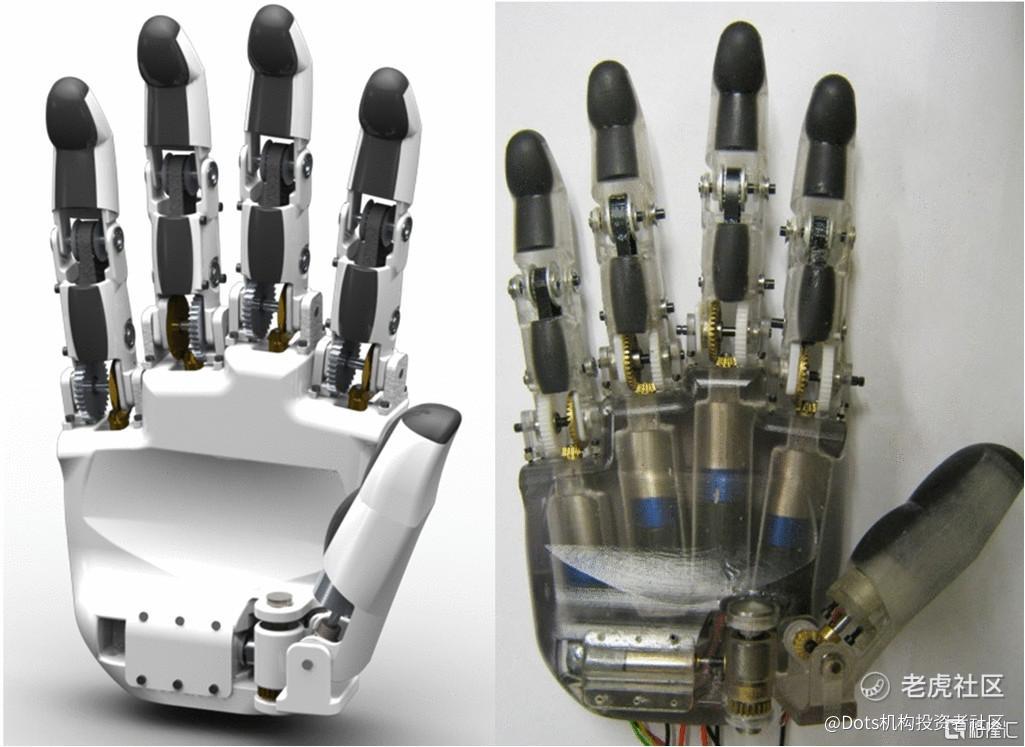
连杆驱动
下图中的仿生手采用了连杆传动,该传动机构由链接板和链接杆组成,由于链接板的某些部分是可移动的,因此该机构可以根据物体的大小和柔软度调整执行器的旋转角度,自动并均匀地调整抓握力。
这种方法可以很好地利用其结构特征,同时提供更好的抓握稳定性,但是设计很复杂,在设计完成后,手指的运动是固定的。
流体驱动
流体驱动的仿生手臂输出力大,摩擦力低,小型流体执行器可直接布置在每个手指活动关节进行运动和扭矩的传递,因此扭矩输出更准确,可减少摩擦和振动。大型流体执行器通常放置在前臂的近端,这就提供了更多的空间,可以安装冲程更高、容量更大的执行器,为仿生手臂增加抓握力。
03小结
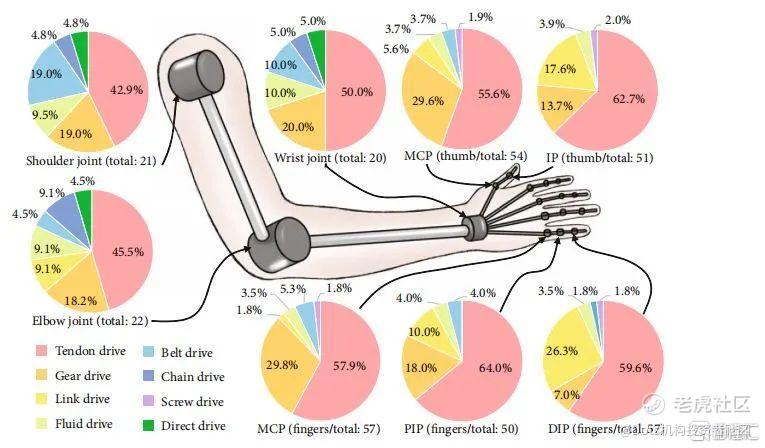
总的来说,肌腱驱动最常用于仿生手臂的整体设计,齿轮驱动常用于拇指和手指的MCP掌指关节,连杆驱动常用于手指的指间关节和肘关节。由多种驱动方法组成的复合驱动系统考虑了不同驱动方法的优势,并广泛应用于机器人机构。选择合适的驱动方法,可以确保该机构具有更理想的设计输出,同时,合理使用低速驱动器以及耦合驱动有时可以进一步优化机器人机构。
本文转自微信公众号“器械之家”,作者:器械之家。
———— END ————
Dots社区现已入驻:
今日头条/扑克财经/见闻见识/雪球/36氪/富途牛牛/老虎社区/大风号/新浪微博/腾讯自选股/财富号/百家号……
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
