近日,途见科技(TachinTech)自主研发的首款柔性触觉数据采集手套TachinGlove及其配套感知开发套件正式发布。TachinGlove是一个Tactile-Egocentric(带触觉的第一视角)数据采集终端:人在自然操作时,可实时、精准采集手指/掌面接触界面的真实触觉数据。
通过将人类手部动作与触觉反馈同步数字化,TachinGlove能够实时构建高保真、多模态的物理交互样本,为具身大模型提供可泛化、可迁移的底层触觉支撑。其轻量化的设计与低延迟传输能力,使大规模真实场景数据采集成为可能,能够打通从感知、理解到决策执行的全链路闭环,让机器人真正“触摸”到这个世界。
它要解决的,并非为机器人多装一个传感器,而是补齐其理解物理世界的“触觉数据通道”。这不是一次简单的硬件发布,而是一次数据采集范式的切换——从依赖固定式采集工厂的“实验室数据”,转向以人为中心、随时随地发生的真实物理交互数据(Human-Centric/Tactile-Egocentric)。
如今,具身大模型在实验室环境中已展现出高度的运动拟合能力,可一旦进入真实物理环境,便会因为缺乏力反馈与接触推理,陷入一种“盲人摸象”的困境——要么因力控偏差损坏物体,要么因接触失败导致动作中断。
实际执行过程中,具身操作的失败,绝大多数不发生在“规划”阶段,而发生在“接触”环节。将一个操作任务拆解为“感知-规划-控制”的经典路径便会发现:在接触发生的瞬间,目前主流的感知方式恰恰是缺乏观测的。视觉、深度、点云能够在中长距离提供稠密信息,而当末端执行器与物体间的距离收敛到毫米级甚至亚毫米级时,可观测性就会急剧下降。视觉在接触尺度的失效,源于模态错配,无法靠视觉迭代来解决。而恰恰是这段区间,决定了抓取的成败。
换言之,当所有人都在争夺“看见”的数据时,真正稀缺、无法从互联网获取、只能依靠接触本身记录的另一半——“触到”,始终无人认领。因此,要把人的操作经验真正转化成机器人可用的策略,Tactile-Egocentric必不可少。
而途见科技和TachinGlove要做的,正是帮助具身智能从“视觉引导下的动作模仿”迈向“基于物理交互的精准操控”新阶段。

TachinGlove:从“硬件采集”到“物理感知”,把“看不见”变成“测得到”
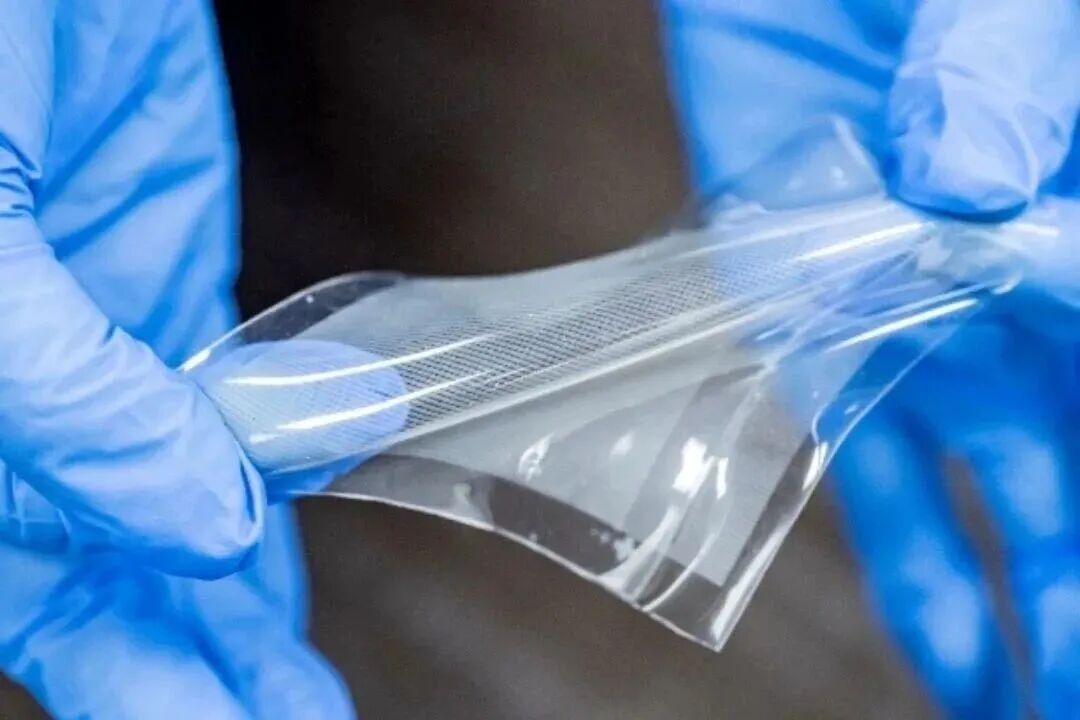
TachinGlove采用仿生掌纹分布布局,集成高密度分布的超薄柔性电子皮肤传感单元,能够提供多模态、超灵敏、更精准的真实界面触觉信息;轻薄透气,保留自然舒适操作体验的同时,兼具耐冲击的实用坚韧特性;支持WiFi无线通信及电池供电,彻底摆脱有线束缚,实现随时随地灵活采集。
同时,基于途见科技全球领先的本征可拉伸电子皮肤技术,采用行业领先的阵列式触觉方案,实现高质量的真实触觉数据的采集,针对以人的操作逻辑为核心的数据采集、机器人训练与遥操作、工业操作数据采集等场景打造的产品级解决方案。
• 全栈感知模态:支持法向力与切向力触觉信号采集,实现对接触界面力学变化的高保真捕捉。
• 真柔性,传感稳定:柔性结构可适配手部弯曲、抓握等常规动作,支持自然操作状态下的数据采集,还原人类自然劳动状态并保持数据输出的稳定性和线性化。
• 空抓无干扰:采用自研的微纳制造工艺与电子皮肤器件结构设计,从底层解决了触觉采集中的“脏数据”难题,实现了真正的“空抓无干扰”,最大程度保障数据纯净度。
• 多模态信号解耦:通过拓扑器件结构优化+电路协同+算法解耦三重手段处理串扰和噪声,输出可直接对齐建模的准确的结构化信号。
• 采集分布多元化:相比成本高、场景单一的固定式数据工厂,TachinGlove把数据采集迁移到真实工作/生活场景,显著提升数据覆盖面——这对训练可泛化的策略至关重要。
除传感器硬件外,途见科技还提供了包括一整套触觉数据清洗与Token化的工具链。

图片来自途见科技
公司算法负责人表示:“在AI训练中,由于触觉信号高频且稀疏,简单的原始信号输入往往导致模型训练难以收敛。我们的核心壁垒在于触觉数据的标准化处理——将混乱的电学原始信号,转化为包含‘物理感知’‘动态接触事件’‘操作源语’的三维语义Token。这让模型能够理解抓握的本质,实现从‘机械模仿’到‘真正理解’的跃迁。”
借助这套闭环采集方案,途见科技还实现了具身智能领域极稀缺的“失败归因”。机器人不仅能记录成功案例,更能通过触觉模态实时判别抓取失败的原因(是滑移、力控偏差还是接触点偏移),从而让模型具备基于触觉反馈的自进化能力。

主动采集+被动沉淀,做碳基世界到硅基世界的触觉摆渡人
TachinGlove的背后,是途见科技对具身触觉数据的一套完整方法论——以人为中心(Human-Centric)的数据范式。如果说TachinGlove解决的是“机器人的手怎么操作”,那么途见科技真正的范式判断,落在更上一层——采集的主体应该是“人”。从一只手的抓取,到全身的站、坐、躺,把碳基世界的接触数据给到硅基世界,让机器人学会如何像人一样存在于这个世界,成为真正能走进工厂和家庭的靠谱伙伴。
途见科技据此构建了以人为中心(Human-Centric)的双引擎采集范式。
引擎一:主动采集,Tactile-Egocentric的高精度真值。TachinGlove是主动引擎,它让人在自然操作中,以第一人称视角主动采集手指/掌面接触界面的力和滑移等物理真值。其特征是精度高、任务结构清晰、面向模型训练——解决的是“喂给机器人的数据够不够准、够不够干净”的问题。这一路,对应机器人操作能力的训练。
引擎二:被动沉淀,围绕“站/坐/躺”的商业化数据回流。但人的接触,远不止“用手操作”。人的一天,本质上是在站、坐、躺三种姿态间切换,每一种姿态,都对应一个真实的商业化场景,也对应一类持续产生的接触数据。
• 站(动)——鞋垫/足底压力:步态、重心、平衡、地面交互。
• 坐——智能座椅/汽车座舱:坐姿、体压分布、人机交互的接触状态。
• 躺——智能床垫:睡姿、长时程体压、呼吸/翻身等低频生理-力学信号。
最终,两条引擎共同沉淀的“以人为核心”的通用数据资产,训练并反哺机器人,机器人执行反馈再校准模型。这条链路里,“人”既是数据的来源,也是商业化的买单方;触觉数据资产,则是连接二者、且会随时间自我增厚的核心资产。Human-Centric范式与“先建机器人数据工厂、再苦等规模化”的路径区别在于,它从第一天起就让数据采集处在商业化的正循环之中。
该范式之所以能闭合,根本原因在于:无论缝在手套上、贴在机器人手上,还是铺在鞋垫里、嵌进座椅与床垫,都是同一套本征可拉伸电子皮肤技术栈、同一种传感原理、同一套信号解耦与标定体系、同一类物理真值定义——它们都生长于一张可量产、可贴合任意异形曲面的电子皮肤之上。没有这张“皮”,双引擎范式在物理层面便无从成立。
图片来自途见科技
途见科技的技术脉络承自斯坦福大学鲍哲南教授实验室——全球柔性电子与电子皮肤领域的奠基者。团队同样为这条最难的路线而配置,核心成员来自斯坦福大学、清华大学、北京大学、帝国理工大学、香港中文大学等名校,横跨材料与器件研发、硬件开发、算法建模等多学科交叉领域。
在工程纵深上,途见科技把材料、微纳工艺、电路、算法构成的多学科“咬合系统”打通,并完成从实验室到产线的工业化跨越——全链路自研、自建产线,并通过IATF16949车规级认证。
视觉给出了世界的形状,触觉给出了世界的质感。途见科技要做的,是把这块至今无人认领、却谁也绕不过的触觉拼图,拼进机器人感知世界的版图。
免责声明:本文内容已获途见科技授权转载,谨供接收方作参考用途,不构成在任何地区对任何证券的研究报告,不构成对接收方的投资建议,亦并非作为买卖、认购证券或其它金融工具及产品的邀请或保证。接收方不应仅依赖本文作出投资决定,且在作出任何投资行动前,应咨询专业意见。华兴资本集团不就本文内容作出任何陈述或保证,对依据或使用本文所载资料所造成的任何后果,华兴资本集团不承担任何责任。
精彩评论