
微美全息科学院:基于虚拟现实技术的铁路电务施工仿真系统设计
基于虚拟现实技术的仿真系统是当前仿真模拟产品的重要组成部分和发展方向,已经在多个领域的仿真模拟中得到广泛应用。作为纳斯达克上市企业“微美全息US.WIMI”旗下研究机构“微美全息科学院”的科学家们针对当前电务施工演练培训方面存在的问题,提出了一种基于虚拟现实技术的铁路电务施工仿真系统设计方案,包括应用背景、系统概述以及系统功能设计等。该虚拟仿真系统参照现场施工标准,执行铁路信号工程施工工艺流程,充分利用虚拟现实、机器学习等多种技术,实现对铁路电务施工及维护人员的培训及考核。
1.引言
随着铁路电务施工技术要求和标准化程度的不断提高,电务职工的施工技术水平也需随之提高,建设实训基地对电务职工进行技能培训及考核成为铁路施工单位的迫切需求。但是,全部基于现场实物的培训基地需要较大场地,且需投入大量的人力、物力和财力;铁路电务设备型号繁多、价格昂贵、使用复杂,很难在一个实物培训基地采购多套完整的真实设备用于职工技能培训、定级考核等作业;现有铁路电务施工作业还存在人员培养周期长、施工图纸不直观,缺乏高效的培训考核技术手段和设备等问题。
因此,现阶段无论是铁路施工单位的电务施工专业培训还是铁路电务段的职工职业技能训练,都需要一套安全、实用、高效、低耗的培训系统。虚拟现实技术(Virtual Reality, VR) 是一种可以创建和模拟各种环境的计算机仿真技术,利用计算机软件生成一种模拟环境,通过具备多种传感器的智能可穿戴设备向使用者提供视觉、听觉、触觉等多种现实世界中真实的感觉。
本文提出一种基于虚拟现实技术的铁路电务施工仿真系统解决方案。该系统参照铁路信号工程项目施工标准,还原现场施工流程、施工要求、注意事项等电务专业施工要素,充分利用虚拟现实技术的表现形式,通过逼真的沉浸式仿真环境调动起使用者的兴趣,将整个施工流程和作业步骤在虚拟化场景中加以展示和演练;同时系统还设计了基于机器学习的智能化专家评估系统,对学员的操作做出评价及分析。
2.系统概述
系统硬件平台基于高性能商用图形工作站和Oculus VR 头盔系统, 软件开发基于Unity3D 平台,采用3Dmax 建模工具,结合. NET 框架程序设计。系统设计便捷、可靠,并且支持跨平台移植,可以方便地在移动终端使用,并在不同终端之间实现自由迁移。应用软件由虚拟现实场景、教学认知、实操演练、智能考核4 个模块组成,后3 个软件模块均基于第1个软件模块实现各自功能。系统组成框图见图1。
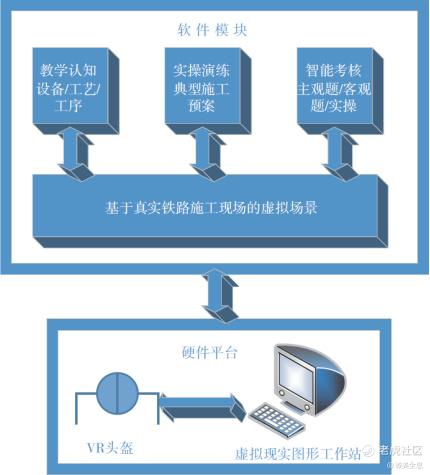
虚拟现实场景模块是实现整个系统功能的载体,它与实际施工环境几乎一致,能够提供良好的沉浸式施工环境体验;施工作业预案来自于现场施工单位,能够提供最贴近电务施工现场专业岗位的演练内容[5-6]。基于典型施工场景,系统通过教学、演练、考核3 条主线,实现整个铁路电务施工过程的实训。教学认知模块在虚拟环境中设计多媒体教学素材,使用者可以很直观地了解信号系统施工环境、工具、流程及技术动作等。系统设计具有交互功能的3D 课件,充分利用文本、图形、三维影像、三维动画和声音等多种媒体表现形式,通过刺激学员的视觉和听觉神经,调动起学员的学习积极性和主动性。
实操演练模块以教师机为控制中枢,可以通过教师机设置并下发各种基于真实现场施工技术要求设计的预案,学员机可以通过本地控制软件完成各自独立的漫游和操作,也可以由教师机指定在组内实现角色扮演交互式演练,真正实现了网络环境下的管理员与学员、学员与学员的互动。智能考核模块具备基于机器学习技术的电子化智能考核功能,可以实现实操及理论客观题、主观题的自动考核、自动评分,结果上传至教师机统计并可打印输出[7]。题库设计为开放式题库,可以由使用教师自行编制试题。系统部分考核功能可以采用基于互联网的B/S 模式,使用者只要在移动终端或者计算机上使用浏览器,即可通过Web Server与服务器的数据库进行数据交互。
3.功能设计
软件采用模块化设计,各模块之间通过接口(协议) 进行通信。本文仅对系统中使用较多新技术、设计相对复杂的功能模块加以阐述。
3.1 虚拟现实场景模块设计
根据铁路施工单位岗位特点,设计实际操作考核场景,最终提取出信号施工工程六大场景,借助VR 交互平台工作站、OCULUS 套装,实现360 度立体展示沉浸式交互体验[4-5]。
1) 信号路基场景,包含敷设电缆、方向电缆盒、终端电缆盒、信号机、钢轨引接线、应答器、双体防护罩等信号设备模型。
2) 信号道岔场景,包含转辙装置、密贴检查装置、道岔融雪电气柜、隔离变压器、道岔跳线等信号设备模型。
3) 信号桥梁场景,包含方向电缆盒、终端电缆盒、信号机、区间信号标志牌、钢轨引接线、应答器、双体防护罩等信号设备模型。
4) 信号隧道场景,包含方向电缆盒、终端电缆盒、五位色灯信号机、钢轨引接线、双体防护罩、扼流变压器等信号设备模型。
5) 信号室内场景,包含电缆柜、综合柜、防雷分线柜、接口柜、信号电源防雷箱、外电网检测箱、电源屏、室内上下走线等信号室内设备模型,见图2。
6) 标准中间站场景,包含完整中间站模型等。

虚拟场景制作技术是体现虚拟世界构建是否真实的重要手段。该系统所有模型通过多层纹理设计,将场景内的重要细节展示出来,然后通过法线的凹凸贴图展示各个场景细节对于光线的反应,从而使整个场景更具立体感。在增加了多层纹理细节之后,整个画面的细腻程度有了很大提升,并且在法线贴图广泛应用之后,整个画面极具层次感。通过使用丰富的光照元素,使画面能够生动起来。为了最大限度地还原施工现场,使用沉浸式体验的表现方式是最佳途径。系统采用基于Face⁃book 系统的VR 设备实现演练功能,可以使受训人员快速融入到场景当中,切实体验到训练内容中的各处细节。系统采用基于Unity 物理引擎编写的第一人称视角行动组件。Unity 自带的物理引擎可以比较完整地模拟虚拟场景中的宏观物理运动,而电务施工大部分的应用场景都是宏观物理力学可以表达的场景。
为了实现全过程身临其境的效果,在Unity 中使用RotateView()函数,可以实现摄像头的自由转动。该函数在3D 场景中通过对主角实施作用力来实现主角的运动,使用该函数后整个人物控制器都是在3D 的模拟力学环境中运动,从而能够较好地完成行动惯性、弹跳等展示任务。使用基于上述技术开发的VR 设备,整个环境对于受训人员的感受都是真实可见并且一一对应的,因此他们在虚拟环境中可以快速对应到实际的施工场景,完成地理位置、材料安装等方面的了解和实操。
3.2智能考核模块设计
为了评测学员的培训掌握情况,系统设计了基于机器学习技术的自动化考核功能,分为专业知识考核和预案考核2 类。
专业知识考核采用B/S 模式,学员通过浏览器进入自己的个人主页,可通过在线考试页卡选择对应的专业知识考核。整个流程借助网络通信技术和数据库技术,既能方便在线学习与考核,又能拥有强大的题库且易于编辑扩充,教师只需要在服务器端编辑或更新基于规定模板的题库,即可实现全网试题的更新和升级。同时,试卷采用既有套组还是自动随机生成可由教师机进行设置,如果选择随机生成,则系统基于机器学习的原理自动根据学员历史操作生成不同难度试卷。
预案考核以教师机为中心,对于学员的操作过程,系统使用了基于机器学习技术的决策树ID3 算法来分析预测其适合的考核标准。决策树通常被用来解决分类问题,通过一系列规则可对数据进行分类,它一般呈现为类似于流程图的树状结构,提供一种在一定条件下得到某些值的类似规则方法。决策树中的每个非叶子节点上的特征是根据不同分类算法特征选择标准,在所有特征之间相互比较获得,从根节点出发,顺着分支到达叶子节点,叶子节点是决策出的结果。每一条路径即为一条分类规则,决策树中的所有这些规则组合在一起就构成了分类器,用来进行预测。决策树计算复杂度不高,便于使用,可处理具有不相关特征的数据,能够很容易地构造出易于理解的规则。系统基于决策树的案例考核模块设计见图3。
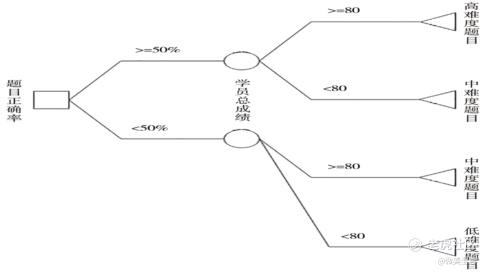
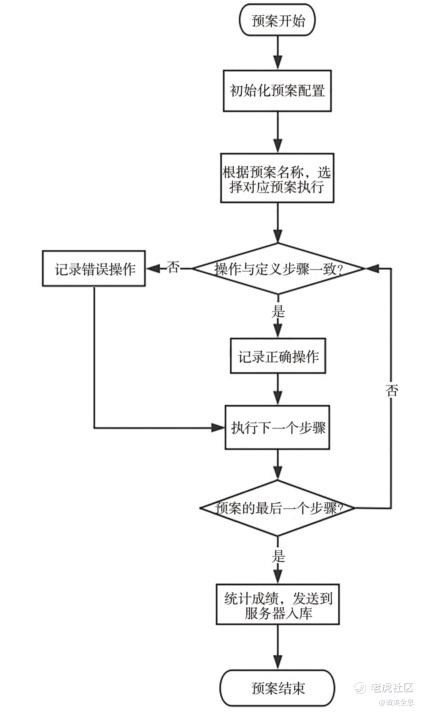
系统将所有学员在实操演练模块中的操作记录在数据库中,使用决策树ID3 算法能够根据登录者在实操演练模块中表现出的操作习惯及错误概率,自动调整评判标准和考核预案选择提示,便于智能化区分初级、中级、高级学员的考核难度,无需更换题库及评判标准,即可得出准确的测试结果。智能考核模块软件流程见图4。
针对学员的每个预案考核结果,根据正确数、错误数,计算正确率、错误率,同时按预案名称分组,计算每个预案所有学员的平均分,并以图表的形式反馈到教员,便能清晰地知道每个学员对具体预案的掌握情况,以及学员知识点的掌握程度。智能考核结果分析见图5。

4结束语
基于虚拟现实技术的电务施工仿真系统在中铁十二局和部分铁路院校实际应用,并取得良好效果。该系统改变了目前国内电务施工单位作业演练的培训方法,硬件投资小,以逼真的形式、完善的错误操作模型库,通过虚拟沉浸式场景最大限度地模拟铁路电务施工作业现场,对使用者有强大的吸引力,能够最大限度地调动使用者的学习兴趣和积极性。通过模拟真实铁路电务工作环境和工作流程,使施工人员熟悉作业环境,演练各种作业环节,有助于解决不可视、不可摸、不可入、危险性场所等施工演练方面的问题,同时可以解决员工培训设备不足、设备型号及技术参数落后等问题,从而提高施工作业仿真和演练的技术水平。
微美全息科学院成立于2020年8月,致力于全息AI视觉探索科技未知,以人类愿景为驱动力,开展基础科学和创新性技术研究。全息科学创新中心致力于全息AI视觉探索科技未知, 吸引、集聚、整合全球相关资源和优势力量,推进以科技创新为核心的全面创新,开展基础科学和创新性技术研究。微美全息科学院计划在以下范畴拓展对未来世界的科学研究:
一、全息计算科学:脑机全息计算、量子全息计算、光电全息计算、中微子全息计算、生物全息计算、磁浮全息计算
二、全息通信科学:脑机全息通信、量子全息通信、暗物质全息通信、真空全息通信、光电全息通信、磁浮全息通信
三、微集成科学:脑机微集成、中微子微集成、生物微集成、光电微集成、量子微集成、磁浮微集成
四、全息云科学:脑机全息云、量子全息云、光电全息云
以下是微美全息科学院的部分科学家成员:
李徐周,山东大学计算机科学与技术学院博士,是模式识别与图像处理方向学术带头人。近年来一直从事模式识别与图像处理等领域的研究、开发与应用工作。曾参与国家自然科学基金重点项目和山东省自然科学基金重点项目等多项课题的研究工作。在模式识别、图像处理等方面打下良好的工作基础。近年来已在模式识别、图像处理等方向发表多篇学术论文。
郑玉洁,重庆大学博士学位,研究方向包括产品设计变更管理、VR/AR驱动商业模式创新,曾经主研的科研项目包括山东科技大学菁英计划的《基于VR/AR技术的复杂机械产品设计变更管理研究》、重庆大学汽车协同创新中心重点项目《VR/AR技术在汽车消费行为偏好挖掘中的应用及关键技术》及其他多项国家自然科学基金项目,也曾参与发表多篇期刊论文。
刘湘辉,国防科技大学计算机工程与科学专业博士,研究方向包括成像卫星任务规划、无线传感器网络以及公路工程管理软件应用等。曾参加多项国家自然科学基金,其中,其在无线传感器网络方面的相关研究论文曾被《计算机研究与发展》、《电子与信息学报》、《软件学报》以及若干国际会议录用和发表。
丁凯,华中科技大学电力电子与电力传动专业博士,香港理工大学研究员,研究方向包括电子电力学仿真技术,电动汽车、电池管理系统等,曾主导过多项相关的研究项目。
郭松睿,湖南大学计算机科学技术工学博士,曾在中科院科学计算国家重点实验室合现实技术研修班学习混合现实,增强现实技术,参与研发多个重点项目。
江涛,中国科学院沈阳自动化研究所博士,机器人学国家重点实验室,研究方向为微型仿生飞行器的气动/结构设计、控制与系统开发,在2018年获得ICRCA-2018机器人EI国际会议"最佳论文奖"。
杨军超,重庆邮电大学通信与信息工程学院信息与通信工程专业博士研究生,华盛顿大学电子工程学院联合培养博士,长期研究虚拟现实、5G多媒体传输优化、基于MEC的智能转码优化,以第一作者发表SCI/EI论文6篇,中文核心1篇,申请专利4项。
李维娜,2017年博士毕业于韩国忠北国立大学的信息和通信工程学院。2017年8月去了新加坡的Singapore-MIT Alliance for research and technology centre(SMART)从事压缩全息(compressive digital holography)的博士后工作,2018年11月进入清华大学深圳国际研究生院的先进制造学部,在以前工作的基础上把数字全息(digital holography)拓展到机器学习(machinelearning)领域,特别是对U型网络(U-net)的改进和应用。在上述研究领域以第一作者发表高水平论文5篇,以第二作者发表的高水平论文2篇。
曲晓峰,香港理工大学博士,现任清华大学深圳研究生院博士后,主要研究生物特征识别、机器视觉、模式识别,与绿米联创合作进行嵌入式产品算法、深度学习应用、图像与视频相关算法以及生物特征识别相关产品的开发。
危昔均,香港理工大学康复治疗科学系博士,南方医科大学深圳医院虚拟现实康复实验室负责人,主要研究基于虚拟现实技术的康复系统搭建及相关临床和基础研究。
单羽,昆士兰科技大学数字媒体研究中心(澳大利亚)博士,研究方向为虚拟现实娱乐产业与亚洲创意经济,曾参加多场虚拟现实产业的国际学术会议并发表主题演讲,发表多篇以“虚拟现实艺术”相关的学术论文,并参与国内多个虚拟现实娱乐产业领域的项目研究。
刘超,新加坡南洋理工大学博士,是深圳市南山区领航人才,深圳市海外高层次人才孔雀计划C类,Molecular Physics 2011年度最佳年轻作者提名,主要研究方向为人工智能预测过渡金属氢化物金属氢键键长与解离能和环式加成反应中量子力学/分子力学反应机理研究,曾参与过流程模拟软件的开发与研究。
张婷,美国西北大学博士后,香港大学博士,海外高层次人才孔雀计划C类,主要从事VR/MR关键技术研发应用和复杂服务系统优化等研究,发表全息专利5项。获全国"挑战杯"创业计划大赛湖北省一等奖,华中科技大学一等奖。
姚卫,湖南大学计算机科学与技术工学博士,主要研究方向:忆阻神经网络及其动力学行为,应用于:图像处理、安全通信。基于VDCCTA具有长时记忆特性的忆阻器电路及其构成的神经网络。参与设计基于忆阻器的神经网络系统模型。基于忆阻器的仿生物神经元和突触连接的微电子电路设计,参与基于忆阻器的神经网络系统模型的设计与动力学行为的分析。
彭华军,博士,毕业于香港科技大学显示技术研究中心(CDR),从事硅基液晶器件、AMOLED材料与器件、TFT器件、显示光学等研发工作。彭博士一直从事信息显示领域前沿工作,涵盖电视图像色彩管理、AMOLED生产制造、微显示芯片设计与制造、投影与近眼显示光学等。彭博士在国际刊物上发表20篇文章。已申请近50项中国发明和美国发明专利,其中10项美国专利和20项中国发明专利获得授权。
陈能军,中国人民大学经济学博士、上海交通大学应用经济学博士后,广东省金融创新研究会副秘书长、广东省国际服务贸易学会理事。主要从事文化科技和产业经济的研究,近年来在版权产业领域研究方面有较好的建树。近年来先后主持、主研“5G时代的数字创意产业:全球价值链重构和中国路径”“深圳加快人工智能产业发展研究”“贸易强国视角下中国版权贸易发展战略研究”,“文化科技融合研究:基于版权交易与金融支持的双重视角”等省部级课题多项,并在《商业研究》《中国流通经济》《中国文化产业评论》等核心期刊发表论文多篇。
潘剑飞,香港理工大学博士学位,现为广东省高校“千百十工程”人才,深圳市海外高层次人才,深圳市高层次人才、深圳大学优秀学者。研究领域主要为自动化+VR应用、先进数字化制造、数字制造全息孪生工厂、机器人等。主持多项国家自然科学基金项目、广东省科技计划项目和广东省自然科学基金项目。
杜玙璠,北京交通大学光学工程博士,取得与显示产品相关专利20余项,发表期刊文章3篇,曾打造全球最高分辨率的8K*4K的VR产品,并提出了采用光场显示技术,解决VR辐辏冲突问题;推出首款国产化率100%的单目AR眼镜,第一次联合提出基于未来空间信息的非接触式交互的操作系统概念(System On Display),在运营商体系进行虚拟现实数字产业合作。
微美全息科学院旨在促进计算机科学和全息、量子计算等相关领域面向实际行业场景和未来世界的前沿研究。建立产研合作平台,促进重大科技创新应用,打造产业、研究中心深度融合的生态圈。微美全息科学院秉承“让有人的地方就有科技”为使命,专注未来世界的全息科学研究,为全球人类科技进步添砖加瓦。
微美全息成立于2015年,纳斯达克股票代码:WiMi。$微美全息(WIMI)$
微美全息专注于全息云服务,主要聚集在车载AR全息HUD、3D全息脉冲LiDAR、头戴光场全息设备、全息半导体、全息云软件、全息汽车导航、元宇宙全息AR/VR设备、元宇宙全息云软件等专业领域,覆盖从全息车载AR技术、3D全息脉冲LiDAR技术、全息视觉半导体技术、全息软件开发、全息AR虚拟广告技术、全息AR虚拟娱乐技术、全息ARSDK支付、互动全息虚拟通讯、元宇宙全息AR技术,元宇宙虚拟云服务等全息AR技术的多个环节,是一家全息云综合技术方案提供商。
免责声明:上述内容仅代表发帖人个人观点,不构成本平台的任何投资建议。
- 一池咸鱼·2022-06-24我大学学的就是与其有关的,其中的视觉难题解决起来太难了。点赞举报
- 时空下流浪·2022-06-24全息产业的发展运用到铁路上确实是物有所值的。点赞举报
