🔥🎯 这不是“炫技专利”,而是 Robotaxi 真正走向规模化的最后一块拼图
这条消息的分量,远超“门会自动开”这么简单。
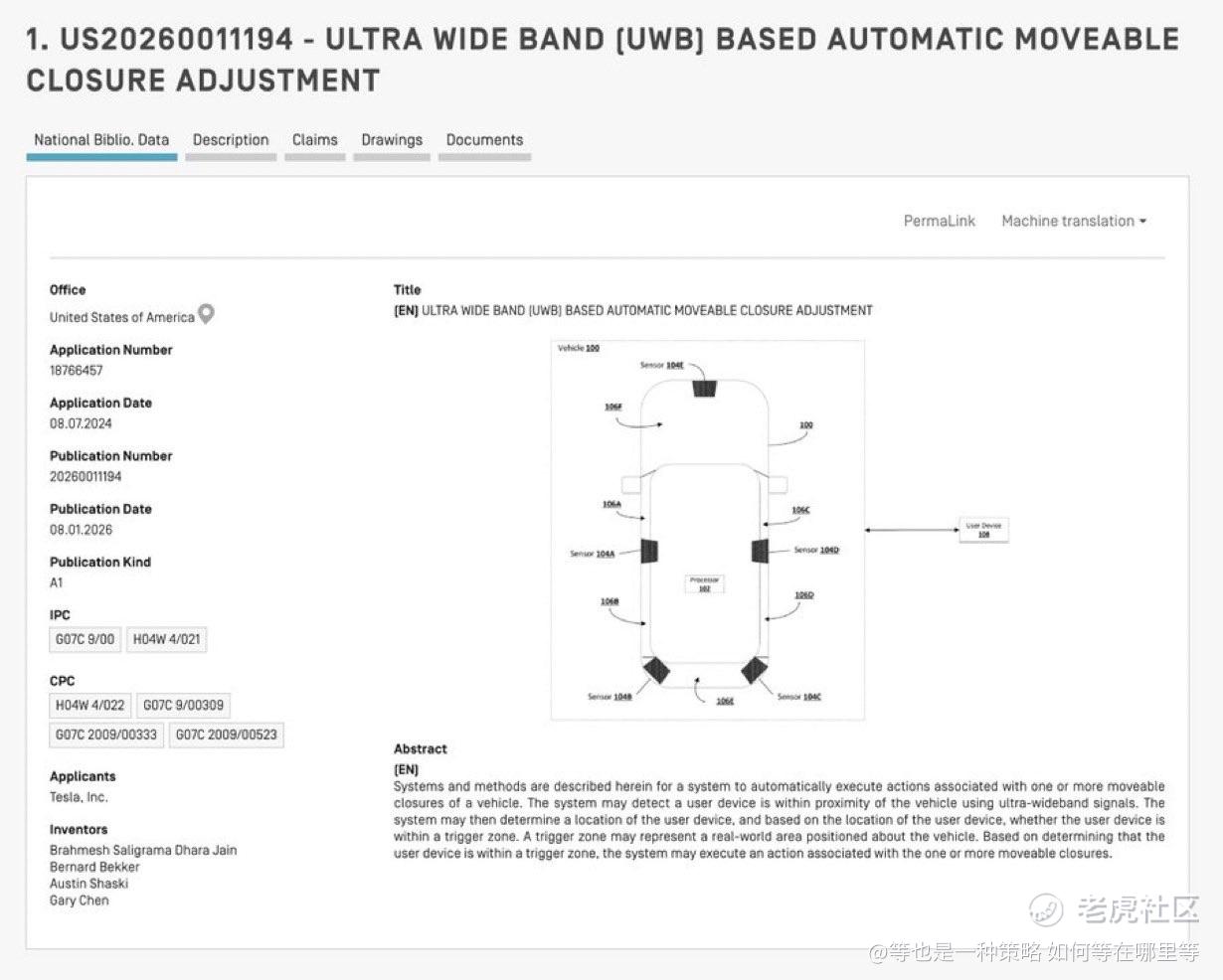
Tesla 最新公布的这项专利,本质上是在解决 Robotaxi 商业化里最容易被忽视、却最致命的一环:人车交互的“最后 1 秒”。
真正的 Robotaxi 魔法,不是能不能自己开到你面前,
而是——
它到了,你还没碰车门,门已经恰到好处地为你打开。
没有迟疑,没有误判,没有尴尬。
这件事,Tesla 现在是用系统级工程在做,而不是“功能堆叠”。
先说一个关键前提:
今天所有被动解锁系统,本质上都是“在猜”。
蓝牙靠信号强弱猜距离,
信号会反射、会被人体遮挡、会被环境干扰,
结果就是误开门、乱弹尾门、靠近不该开、不该关的时候关。
Robotaxi 时代,这种“猜”是不可接受的。
Tesla 的做法,是彻底换一套逻辑。
他们引入 UWB(超宽带),不看信号强度,而是看 time-of-flight(飞行时间),
纳秒级精度,直接知道你在哪里。
但真正厉害的,不只是 UWB,
而是把这些定位点,转化成几何触发区。
不是一个圆形半径,
而是“哪些传感器看到你、哪些没看到你”的空间组合。
这让车可以实时判断:
你是在正确位置准备上车,
还是只是路过,
还是想装东西,
还是只是探身拿包。
再往下一层,是工程上的聪明。
UWB 如果 24 小时开着,电池根本扛不住。
Tesla 用 BLE 作为低功耗“哨兵”,
只有确认是你的设备,才唤醒 UWB 精准定位。
BLE 负责“有没有人”,
UWB 负责“人在哪”。
这套切换,是为了 无人车长期在线仍然可行。
而最关键的一步,是 Tesla 在教车“理解你的意图”。
系统不会只看门是否打开,
而是结合手机位置、移动轨迹、座椅重量变化,
用神经网络判断:
你是真的要上车,
还是只是弯腰拿个东西。
这一步,决定了未来无人车会不会“夹到人”,
也是自动驾驶能不能彻底去掉人类监控的安全前提。
你会发现,这项专利反复强调的不是“自动”,
而是克制。
什么时候绝对不能动,
什么时候必须等,
什么时候才是正确动作。
甚至连“你走过太快就不该开尾门”这种细节,都被写进逻辑里。
最后那个被很多人忽略的细节,其实最重要——
专利里反复出现的不是“开门角度”,而是**“滑动比例”**。
这几乎是在明牌:
这套系统,是为 Cybercab / 无人车 / 滑动门 设计的。
在无人驾驶世界里,滑动门是最优解,
但前提是:
车必须知道什么时候该滑、滑多少、会不会撞到人。
这套 UWB + 几何触发 + 行为判断,
正好补齐了这一块。
一句话总结:
这不是让车“更酷”,
而是让车具备 类人直觉。
能分清你是赶时间、路过、装货、上车,
并且永远不会做出让人害怕的动作。
这,才是 Robotaxi 从“能跑”走向“可规模化”的分水岭。
📣我会持续拆解 Tesla 在 Robotaxi、Cybercab 与无人化落地上的关键技术拐点,把哪些是真正的规模化能力、哪些只是演示阶段,讲清楚给你看。
精彩评论