微波雷达 vs.激光雷达
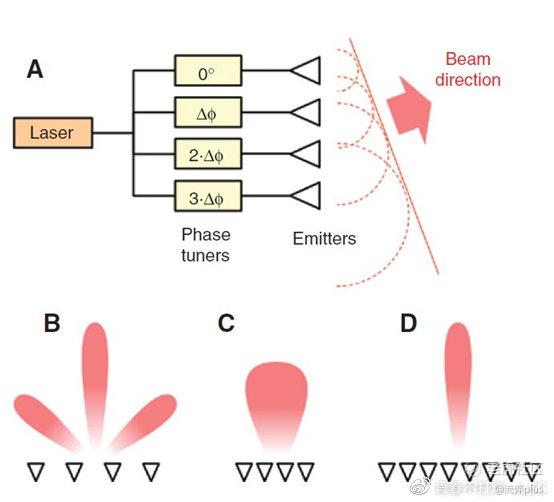
首先,我们了解下OPA的基本原理。最早的光学相位阵列可以追溯到1971年Meyer在钽酸锂(lithium tantalite)上实现了一维扫描。相控阵在微波雷达里面早已经大规模使用了,要理解相控阵,要先知道一些基础的物理概念,例如波的相干叠加。在波动光学里面,光其实也是一种电磁波,自然要遵循电磁波的物理学定律,其中就包括波的相干叠加。假设两束光来自不同的光源(相位、频率等并无相关性),当他们相遇时,什么事情都不会发生,各自走各自的路,这种光我们认为是非相干的,遵循波的独立传播原理。如果两束光是相干的(相位差稳定、频率相同),当他们存在平行前进的分量时,就会发生相干叠加,叠加后的结果就是两个波矢量合成。著名的双缝干涉实验就是基于这一物理现象解释的,两条缝相当于两个相干光源,其相干叠加的效果就是明暗相间的条纹。

当光源不是两个,而是一个复杂的光源阵列呢?这就是我们讨论的光学相位阵列(简称相控阵)。当这些光源阵列,按照等差数列分布,干涉的结果便是棱镜的折射效果,光波随着相位差的变化,沿着不同的方向传播,类似改变棱镜的斜角。另外一个物理现象是,当这些阵列光源越多越密,干涉后的光斑分布就越“干净”,如下图所示,这点涉及到我们经常会提及的OPA的旁瓣抑制问题。通过调节各个光源的相位延时,就可以获得不同的出射角度。看起来原理很简单,恰恰是这个“相位延时”成了OPA方案里面的最核心主题,所有的技术方案都围绕这点去优化:我们需要一个可集成度高、相位调节范围大(2*Pi)、电控切换速度快、有源区面积大的光学相位调制器。
OPA技术方案非常多,目前最为成熟的是前文提及的液晶相控阵。液晶SLM已经作为成熟产品销售,但是作为激光成像雷达应用,最大的瓶颈是扫描速度,液晶的响应时间通常大于3ms,这意味着每秒钟最多采集300多个点,即便有研究组开发高速的液晶器件,其速度也在亚毫秒级别,比起激光雷达要求的几百kHz到MHz的扫描频率,显然是相差甚远。其他材料的相位调制器,如铌酸锂、PLZT、AlGaAs等,速度倒是足够快(GHz),但是应用瓶颈在于这些材料的光电系数较低,要实现2*pi相位调节需要大尺寸的器件,对于单一器件和小角度扫描的应用而言体积没有问题,但是对于大面积的阵列集成显然也不适用。
目前最流行的方案就是基于硅光的方案了,上文所列的OPA创业公司,几乎全部基于硅光OPA方案。硅光方案的优势在于:得益于光通信场合应用,硅光子学发展相对成熟,加工工艺容易与CMOS工艺整合。主动(调制器等)与被动(波导等)器件设计已经探索多年,可选方案很多。全片上光信息处理优势很大。而硅光方案的劣势,也是诸多团队需要克服的困难在于:与自由空间光有耦合的应用场合(例如激光雷达)会引入较大损耗,在MIT硅光激光雷达方案中,不计算各个部件插入损耗,单是光学波导和发射天线的损耗就高达75%。激光如果不是片上集成,会引入至少40-60%的耦合损耗。另外,硅材料本身的电光效应很弱,基于硅波导的调制器要么基于热效应(MIT方案),要么采用更复杂的设计。基于热效应的方案则会使得器件响应时间大幅度增加到us级别(MIT硅光子方案响应时间2.3us)。因此,硅光子学是高密度光电芯片的最优选择之一。在与环境光耦合方面,硅光子学存在损耗大等问题,对于远距离的应用,需要提升芯片输出功率,同时减少硅材料的非线性效应的影响。而硅材料的相位调制器件的设计也有瓶颈,需要技术创新来优化性能。
与MEMS方案类似,OPA方案即便解决上述问题,也就是作为一个完美的发射端解决方案,接收端的问题依然没有解决,目前大部分创业团队的解决方式是采用面阵接收器(APD阵列等),于是,我们在OPA技术路线里面,引入了面阵成像技术路线所要解决的问题:固定接收视场角、面阵加工难度和成本目前都很高。OPA方案的创业团队何去何从,我们拭目以待。下面我们简单介绍下这些团队:
Quanergy:OPA技术路线的骨灰级玩家,自成立之日起就向全世界勾勒OPA方案的美好前景,我们认为下图最能显示OPA方案区分于其他技术路线的独特性能:超高的集成度和算法控制的随意电控扫描。这两点无论是在MEMS还是面阵方案里面,都不容易实现。Quanergy成立于2012年11月,分别于2013年11月和2014年4月获得80.9万美金种子轮投资,和449.9万美金的天使轮投资,并于2014年11月获得4000万美金A轮投资,2016年8月完成9000万美金B轮融资,2017年传出消息计划2018年IPO同时在中国寻求投资者,如果成功,Quanergy将成为全球第一家IPO的激光雷达创业公司。Quanergy的专利布局在众多激光雷达创业公司里面尤为突出,目前Quanergy已经公开的专利至少六个,宣称材料中宣称共拥有15件专利及8件未决申请,覆盖了其M8机械式雷达和硅光OPA的方方面面。由专利内容透露的信息可以看到,Quanergy的技术路线跟MIT Michael R.Watts的硅光方案是类似的,与其CEO Eladada的技术背景也一脉相承。

Blackmore:扫描技术路线为OPA,而测距技术路线为FMCW(调频连续波)。Blackmore于2016年12月获得350万美金投资,本轮融资由 NextFrontier Capital 领投,MillenniumTechnology Value Partners 参资。2018年3月该公司获得宝马i-Venture的1800万美金投资。
Strobe: 成立于2014年,由Juliet Schoenfeld和Lute Maleki成立。Juliet是一位连续创业者,而Lute早前是NASA喷气推进实验室的科学家,曾经从事激光雷达研究。Strobe于2017年10月被通用汽车收购。其技术方案同样为OPA+FMCW,不过技术方面强调的亮点是WGM(whispering gallerymode,回廊耳语模式)谐振腔获得窄线宽可调谐激光输出。
3)面阵成像激光雷达
典型企业和产品:Tetravue,Princeton Lightwave,LeddarTech的LCA3,Trilumina (VCSEL阵列),Toyota丰田,ESPROS的EPC660/635系列面阵,Advanced Scientific Concepts(ASC),TI的OPT8241等;
这里我们措辞用的是面阵成像激光雷达,而不是Flash(Flash通常指所有参与成像单元同时完成测量并输出一帧三维图像的器件),由于各种激光雷达技术的不停演化、组合,一部分激光雷达技术路线已经不是Flash的定义范围了,因此我们将讨论范围限定在基于面阵接收器的激光雷达。相比OPA,面阵方案着重点是在接收端,由于面阵接收器基于传统半导体工艺加工,经历了长期的工艺研发,面阵芯片技术相对较为成熟,因此面阵技术路线显得更快会落地商用,国内外很多团队选择了面阵技术路线,固态激光雷达的方案对比也大多集中在面阵和OPA之间。早期的面阵技术,多采用连续波调整,测距方式以对光源和接收端的相位/幅度调制为主,类似产品有TI的ToF芯片OPT8241、ESPROS的EPC660、Hitachi的3D ToF模块等,这些产品目前测量距离大多不是很远(10m左右),在采用一些信号处理方法后例如伪随机码编码等,理论上可以提升测量距离,但是还要依赖于镜头、激光功率等因素的系统配合,要接近或者达到理论值并不容易,而且这些技术路线有成熟的芯片解决方案,通常他们自身面对的市场竞争者并不是远距离的车载雷达而是同样是近距离成像的双目、结构光等技术路线。远距离面阵成像由于抑制噪声的需求强烈,于是有了“门选通(gated)”的概念—让探测器在某个制定的时间内打开其他时间关闭,避免一直存在的背景噪声覆盖经过调制(脉冲幅度、相位、频率等)的信号。Tetravue、ASC和PrincetonLightwave分别代表了三种最典型的面阵方案:基于传统摄像头成像阵列的光切片技术、基于线性模式APD(LMAPD)阵列技术、基于盖革模式APD(GMAPD)阵列技术(也就是单光子成像激光雷达)。无论哪一种技术路线,在面阵方案中,视场角(望远镜还是广角镜?)和动态范围(远近能否兼顾?)是讨论方案优劣的基础性参数。
3.1)基于传统摄像头成像阵列的光切片技术(time slicing)
代表公司是TetraVue,国内研究也大多集中在这个方向上,这一技术路线最明显的优势就是避开了大规模APD阵列的开发,采用成熟的CMOS/CCD面阵(也就是我们平时所用的摄像头)作为成像单元。早期从事这种面阵激光雷达研究的最杰出代表是美国的Sandia国家实验室,1990年就提出了面阵激光雷达,1993年研制成功第一套采用ICCD作为探测器的样机。之后这种面阵激光雷达被用在2003年的激光雷达引导的国际空间站对接,2006年被用于航天飞机表面的扫描。通常被在这一技术方案中的面阵探测器为ICCD(intensifying CCD,增强CCD)/EMCCD(electron multiplying CCD,电子倍增CCD),两者都是基于传统CCD探测器的功能增强,ICCD前面加了像增强器,EMCCD则在传统CCD的读出寄存器单元后面增加了增益寄存器,增强了微弱信号检测的能力。相比ICCD,EMCCD不能工作在“门选通”模式下,ICCD则可以在纳秒脉冲驱动下选通达到抑制背景噪声的目的,正因为EMCCD既对光很灵敏,但是又没法排除背景光子的影响,因此EMCCD通常工作在低温(例如-70度)下,但是EMCCD的优点是由于没有额外光电转换器件与其相互作用,所以光学系统与面阵接收器之间可以达到很好的成像效果。但是ICCD的劣势也很明显:由于光增强单元的存在导致体积较大、由于光信号经过转换导致空间分辨率较低、光学系统MTF(modulation transfer function)较差。目前这类面阵探测器的主要制造商有Andor、Princeton Instrument(区分另外一个单光子面阵激光雷达玩家PrincetonLightwave)、Stanford ComputerOptics等。除此以外,一些CMOS面阵也在探索中,由于CMOS面阵灵敏度天然低于CCD,但是其优点是响应速度块而且消费市场大规模应用前景远好于CCD。
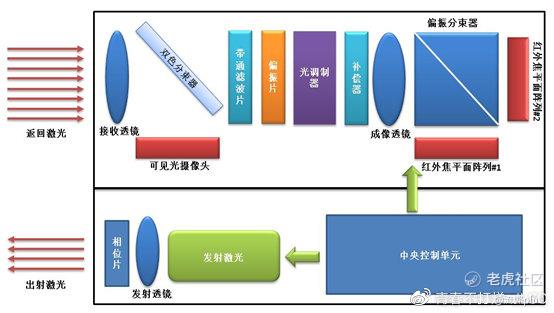
TetraVue采用的是光切片“light slicer”技术,其系统原理如下图所示。Flash雷达其实就是一个打着手电筒(激光)的摄像头系统,只不过采集的信息是三维信息。由于采用面阵光源,所以激光功率通常需要较高,在TetraVue公布的方案里,激光出射后还需要加相位片做匀光,保证视场范围内光是尽量均匀的,由于光切片方案最后的距离值是间接由两个摄像头的接收到的光强度的比值获得,所以不均匀的光强分布会影响测距精度。接收端则更为复杂,光切片的基本原理是通过对光调制器(通常为非线性光电晶体)施加电压信号,使得入射光的偏振随时间线性变化(是不是联想到了调频连续波?),因此不同距离返回的光由于返回时间不一样,所以尽管光电晶体后偏振偏转的角度也不一样,经过偏振分束器(根据偏振方向不一样将光分到两个方向的光器件)后,不同时间返回的光会在两个FPA,focal plane array)上分配不同的光强比例。因此,通过计算两个FPA上收集到的图像灰度比例,可以计算出物体距离测量系统的距离。大部分国内团队的光切片方案跟TetraVue的是类似的,转换不同的探测器(ICCD/EMCCD/CMOS)得到不同的优化系统而已。从测距成像原理我们可以看到光切片方案需要解决如下问题:
1, 接收视场角的问题,光电晶体通常入射角范围非常小(例如正负1度),TetraVue的方案应该是已经解决了这个问题,通过串联/并联减薄单一晶体厚度(降低驱动电压),增加收光孔径,同时通过不同的材料加上多个非线性晶体盒补偿不同角度入射导致的各向异性偏振变化量,达到大接收视场角(大于5度甚至到40度)和低驱动电压的目的。
2, 动态范围和景深(DOF,depth of field),接收器由于采用的是CCD或者CMOS面阵,这些探测器本身对于输入信号是有要求的(最低可探测值到饱和值),这个范围我们称为动态范围,Flash方案由于采用面阵光照明,远处和近处的光强密度会差异非常大,导致探测器超出量程,因此通常要采用门选通的形式,采用动态的增益控制或者激光功率控制,而每一个打开的“门”能测量的距离我们称之为景深(跟我们相机景深定义是一样的,超出这个范围的图像会模糊或者没法接收),要取得完整的图像,需要多个选通门拼接起来。这个问题对于航空测绘等应用往往问题不大,先验知识告诉我们飞机离地面的这段距离几乎是空白的不需要采集信息的区域,因此只需要采集飞行高度加减某个数值范围的三维信息。而到了导航型雷达这里就变得不一样了,激光雷达需要测量距离远没有测绘里面的高(200-300米),但是测量范围几乎要求由零开始全部覆盖。因此形成了Flash方案远近难以兼顾的局面,无论是光学部件(镜头等)还是电子部件(FPA等),都在一定程度限制了Flash雷达的动态范围。
3, 非线性晶体对温度非常敏感,需要控制好系统温度或者对系统做正负补偿设计;
4, 光切片或者Flash方案,对光源的要求比较独特,既要充分利用激光的方向性和单色性,保证光学系统的信噪比,又不能用太好的激光:激光的相干性要低。因为如果激光的相干性太好,会产生激光光束与自身干涉而产生斑点,导致光强度不均匀。
5, 基于传统摄像头的Flash方案,目前大多采用脉冲飞行时间测距法,采用连续波理论上是可行的,但是同样作用距离下需要提高激光功率,同时图像处理的复杂度会增加(不再是简单的两幅图像的强度比值)。而大面积的脉冲光打出去,假设某天到处都是激光雷达的汽车或者机器人在路上跑的时候,激光安全和雷达相互串扰就会成为一个严重问题。
3.2)基于线性模式APD(LMAPD)的激光雷达系统
采用LMAPD阵列搭建激光雷达系统的典型企业是2016年被德国大陆汽车收购的Advanced Scientific Concepts(ASC),ASC自身另外一个主打产品是PIN(在P和N半导体材料之间加入一薄层低掺杂的本征(Intrinsic)半导体层,组成的这种P-I-N结构的二极管就是PIN 二极管)阵列,而另外一家激光雷达创业企业Luminar则采用的1550nm波段的PIN阵列,相比APD,PIN探测器的灵敏度要低很多,暗电流也会较大。下图是同样光照条件下PIN阵列和APD阵列的成像对比图,灵敏度方面APD有明显优势,普遍认为PIN探测器不适宜远距离、大动态范围的激光测距应用。但是PIN阵列在工艺难度和价格方面都远低于APD。此外,加拿大的LeddarTech部分产品采用的线阵/面阵探测器应该也属于LMAPD。

军工企业美国雷神公司2000年开始研究LMAPD阵列,2011年发布了256*256像素单元的阵列并研制了相应的激光雷达系统。而ASC也是较早开始基于InGaAs材料的LMAPD阵列研究的一家研究机构,同时他们也研究PIN阵列,其产品以128*128像素单元APD阵列为主。德国著名的APD供应商First Sensor供应单点APD的同时也有5*5和8*8的阵列销售。法国的CEA-LETI与以色列的Sofradir公司合作,开发了HgCdTe材料的320*256像素的APD。那么我们也许会问:单点APD既然已经成熟应用,做成阵列不就是排列起来吗?由单点到阵列中间究竟要解决什么技术问题?其实由单点到阵列要解决的问题要复杂得多,除了原来单点的工艺要控制得非常好,阵列化后新增加的问题有:
· 像素与像素直接的串扰(包括光和电,APD被激发后发出的光会成为相邻像素单元的噪声,电的串扰在来自读出电路和自身雪崩过程);
· 阵列均一度,APD本来就是非常灵敏的器件,半导体材料的掺杂情况会直接影响器件特性例如耗尽层的电场强度等;
· 暗电流控制,这个问题同样存在于单点APD,但是到了阵列器件里面,难度大大增加了;
· 电路复杂度大大增加,阵列的读出IC(ROIC)需要完成阵列式的预放、一级放大、脉冲甄别、时间数字转换(TDC)等功能;
目前全球范围内能生产大规模APD阵列的公司或者机构屈指可数。而国内由于在半导体工艺方面的差距,量产的阵列以PIN为主,APD阵列以学术研究机构制备的小规模阵列(3*3,8*8等)为主。
首先我们要搞清楚APD的工作模式:线性模式和盖革模式(也就是单光子模式)。如下图所示,当APD的偏置电压低于其雪崩电压时,APD对入射光激发的光电子做线性放大,而且反向偏置的电压越高,增益越高。我们称这个范围内工作的APD为线性模式的APD(LMAPD)随着电压继续增高,当其高于雪崩电压时,APD的增益迅速增加,单个光子的入射就可以触发雪崩,我们称这种工作状态下的APD为盖革模式的APD(GMAPD),这种APD也就是我们经常说的单光子探测器,在随后的单光子成像激光雷达中我们会分析这种技术路线。

图片来源:Proceedings of SPIE - The International Society forOptical Engineering 6220 · May 2006
简单来看,LMAPD阵列的成像激光雷达似乎只是单点的阵列化延伸,测距模式、信号处理等技术细节都一致。但是由于工艺限制,目前LMAPD阵列均匀性依然有问题,一般基于LMAPD阵列的激光雷达都只能获取距离像,灰度图像依然存在问题。目前针对LMAPD的提升主要集中在提升像素单元、小型化、高帧率等方面。对于实际应用而言,搭建一个基于LMAPD阵列的激光雷达目前并没有不可逾越的技术障碍,ASC的128*128阵列已经在许多应用场景应用多年并取得成功,未来留给APD阵列的更多是性能的提升和优化并切合实际应用场景例如无人驾驶,业界也期待将来大规模商用后的成本大幅度降低,目前较大规模的LMAPD阵列都非常昂贵,即便是应用于医疗仪器中的像素数目较多(大于1000像素点)的线阵APD报价都高达数万元人民币。
3.3)基于盖革模式APD(GMAPD)的激光雷达系统(单光子激光雷达)
盖革模式的APD(Geiger Mode APD),也称为单光子雪崩二极管(SPAD,single photon avalanche diode),Princeton Lightwave是单光子激光雷达的最具实力玩家。单光子激光雷达的媒体曝光率要远高于线性模式APD的激光雷达,其单光子检测能力给人的印象是超灵敏因此性能优越。但是实际上并非如此,与LMAPD激光雷达相比,在大部分性能上单光子激光雷达是处于劣势的。时至今日,LMAPD阵列的发展却要落后于SPAD阵列,其中大部分原因是CMOS产业的选择。传统CMOS工艺自20世纪60年代开始发展,直到90年代才真正达到应用要求,期间经历了无源、有源、数字三代工艺迭代。用于制备低灵敏度的CMOS传感器,而比之更早发展的是CCD传感器,早期CMOS一直没法摆脱低灵敏度、高噪声、图像分辨率低等问题,而直到今天CCD传感器的灵敏度都比CMOS要好,虽然CMOS工艺在不断进步,电子消噪等技术不断获得突破,并且越来越接近CCD的水平,目前在消费产品里面CMOS摄像头已经完全取代CCD。CMOS技术继续提升,就往弱光检测方向发展,而其中基于CMOS工艺的APD阵列就是其中一个研发重点。无论是LMAPD还是GMAPD,结构其实都很简单,就一个PN结,施加反向偏压后在耗尽区(depletion)从阴极(cathode)扩散到阳极(anode),光电子雪崩过程依赖耗尽区的电场和电子。目前的CMOS工艺大多数是平面工艺,通用型的CMOS工艺掺杂等流程都受到foundry的限制,因此目前代工生产出来的GMAPD大多数是通用型的PN结加上背后设计好的CMOS电路。值得注意的是,有源区背后的电路无论对于GMAPD还是LMAPD都是一个重点加难点,与CMOS阵列类似,APD阵列在探测器本身完成信号放大等基本功能,而作为测距阵列,还要同时完成数模转换、测距输出等功能,因此对集成电路的噪声控制要求大大提高了。目前基于硅材料的LMAPD阵列(一般感应波长小于1.1um)大部分可以基于标准的CMOS工艺线制造,而1.55um等通信波长则必须要基于专用的InGaAs/InP等III-V族符合半导体工艺,成本远远高于硅工艺。2013年Princeton Lightwave某款用于国防用途的阵列售价就高达15万美金。而LMAPD的CMOS工艺制造从2000年以后就不断有学者研究并且有论文发表,但是效果一直不是很好,其中最大的技术难点是控制噪声和CMOS超低噪声的信号放大器制造,半导体制造过程中掺杂过程的离子注入和退火等工艺都对暗电流的产生影响很大,某些结构下的读出电路ROIC中的CMOS二极管的发光都会成为感光区的噪声。所以APD阵列的开发,技术上是材料和电的问题,而更大的障碍其实是CMOS工艺成熟度和产业自然选择。据我们了解,国内有团队具备GMAPD(SPAD)阵列芯片的设计能力,代工依然是在欧洲。目前GMAPD阵列传感器最大的应用场景是应用于消费电子产品的短距离(4-10m)的三维成像,类似苹果iPhone的结构光模块,微软的Kinnect模块,Intel的Realsense模块等。那GMAPD用于远距离Flash Lidar的前景如何呢?
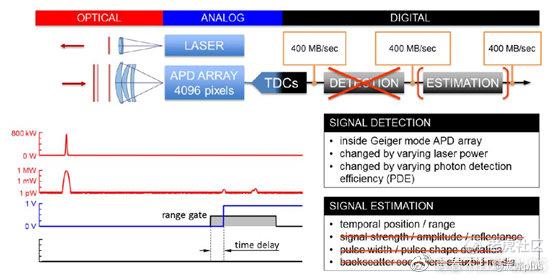
首先我们要清楚单光子成像的基本技术特征。下图来源于老牌测绘激光雷达企业RIEGL发表的论文,图片展示了GMAPD的工作简图,采用的是脉冲测距法(近距离SPAD阵列大多采用连续波测距,但是目前连续波的单光子激光雷达测量距离能达到多远依然存疑),该论文对比了LMAPD和GMAPD在航空测绘中的性能差异。被红线删除或者打了红×的就是GMAPD和LMAPD的差别。由图中我们可以获得以下几个基本认知:
· GMAPD不像LMAPD,它只检测光子“有”和“无”(binary),而LMAPD可以输出连续的信号波形、强度等等信息;
· GMAPD有无源、有源、门控三种工作模式,图中表示的就是工作在门控模式下的GMAPD。GMAPD工作在高灵敏度的雪崩电压区域,热噪声、半导体的隧道效应等都会产生误计数,因此在对探测目标距离有先验认知的情况下,可以采用门控的方式,在某个脉冲周期内打开探测器等待脉冲信号返回,其他时间APD工作在线性模式下。这是目前单光子成像中常用的降低噪声影响和降低暗记数的方法。这种方法在航空测绘里面应用毫无问题,搭载激光雷达的飞机离地面这段距离中间,先验知识告诉我们这段距离是没有信息量可以忽略的,因此只需要在地面起伏的区间打开探测器。但是汽车这类应用场景却不一样。这个差异有点类似我们前文介绍基于CCD和CMOS面阵的Flash方案提及的景深问题。GMAPD技术路线里面这个问题并非无解,采用连续门再做距离拼接同时结合动态门控算法可以解决问题,适当增加系统复杂度。根据不同探测器动态范围的性能,可能还需要动态调节光源功率。
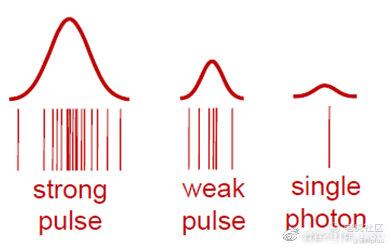
· 对模拟信号的处理上,单光子激光雷达比LMAPD要简单很多,由于阵列输出的就是0,1数据序列,只要对数字信号进行处理计算飞行时间。但是由于GMAPD每次测量只有一个0-1信息,要重现脉冲需要一组0-1脉冲序列,通常要保证探测概率同时降低虚警率(false alarm),单光子方案中通常需要50-100次测量。
· 单光子方案没法探测光强,因此没法获得目标的反射率信息。
精彩评论